


ラズベリーパイは基板上に「GPIO」と呼ばれる、ラズベリーパイ上で作成したプログラムから信号の入力・信号の出力といった制御をすることができるピンが存在します。
信号の入力とは「スイッチのON/OFF」「温度計で室温の計測」といった、ラズベリーパイの外の情報を入力(インプット)してプログラム上で使用することです。
対して、信号の出力とは「LEDを点灯させる」「モータを回す」といった、ラズベリーパイで制御した結果を外に出力(アウトプット)することです。
この記事では、ラズベリーパイのGPIOピンを用いてスイッチのON/OFF状態を読み取り、実行結果に”0” or ”1”として表示させる方法について解説します。
目次
1. 完成イメージ(スイッチのON/OFF状態を読み取る)
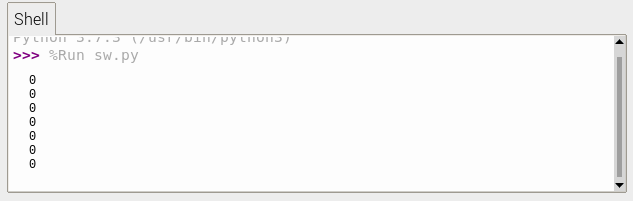
この記事で完成するものは以下のようになります。
↑はラズベリーパイでPythonを実行するアプリケーション「Thonny(トニー)」の実行結果を映しています。(ちょっと見えにくいですが…)
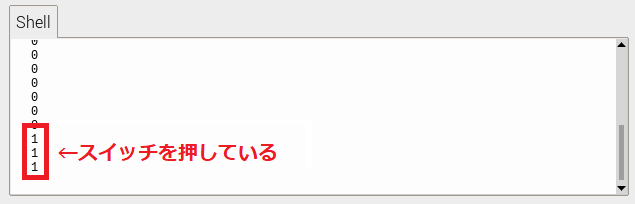
今回はスイッチが押されている時に”1”、押されていないときに”0”を1秒間隔で表示するようにしています。
↓スイッチが押されていないとき
↓スイッチを途中で押したとき
2. 使用する部品
今回使用する部品は以下の通りです。
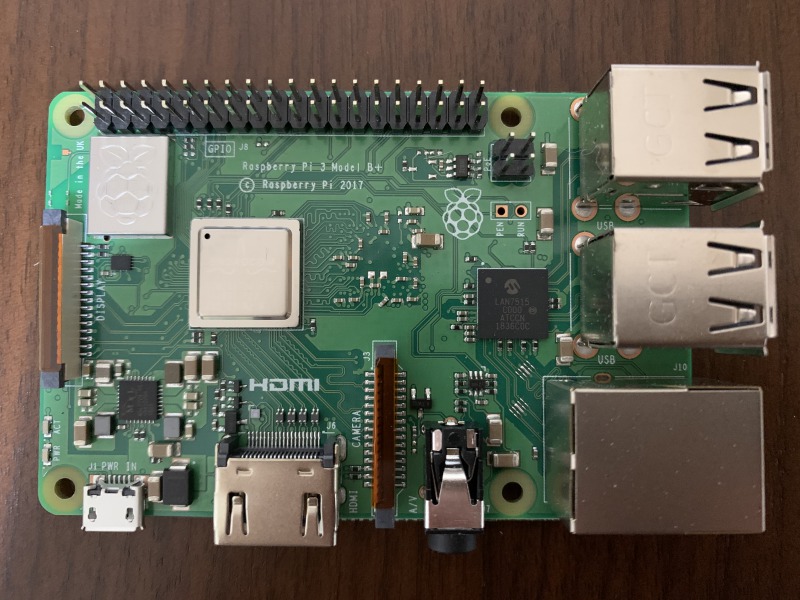
『Raspberry Pi 3 Model B+』を使用します。※2019年12月時点で最新はRaspberry Pi 4になります。
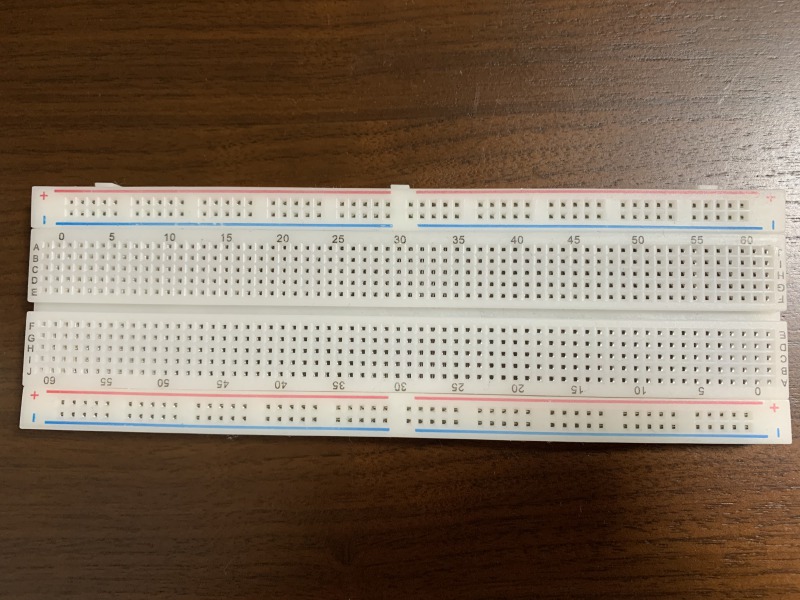
LEDや抵抗といった各種部品や(後述する)ジャンパ線などを穴に差し込み、部品間を電気的に接続する板(ボード)です。
電子工作をする上で必須の部品です。
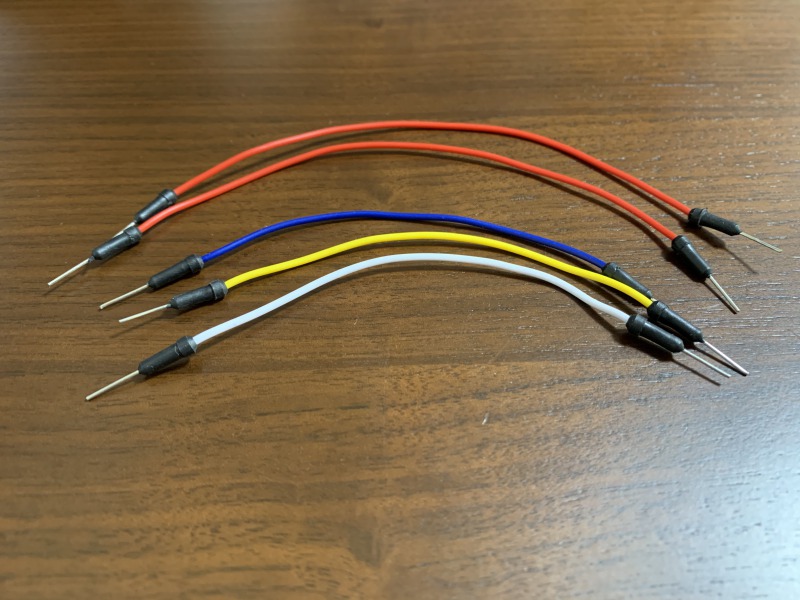
ブレッドボートに差し込み、電子部品の間を電気的に接続します。
↑の写真では両側が「ピン」になっており、ブレッドボートの穴に差し込んで使用します。

スイッチを押すと、内部の回路が繋がり電流を流します。
↑のタクトスイッチの場合、黒い部分を指などで押します。
電子工作をするため、これまで解説した部品の他にもスイッチやセンサなど、色々な部品が必要になってきます。個々で購入するには手間がかかるため、最初はセット品を購入することをおススメします。

私は以下のセット品を購入しました!
また、これからラズベリーパイを購入する場合、ラズベリーパイ本体を含めたセット品を購入することをおススメします。
ラズベリーパイ本体を収めるケースや、OSをインストールするためmicroSDカードなど必要なものを個々に購入する手間を省くことができます。
3. 回路図・配線の様子
ラズベリーパイのGPIOピンを用いてスイッチのON/OFF状態を読み取り、実行結果に”0” or ”1”として表示させる回路を解説します。
回路図は以下のようになります。
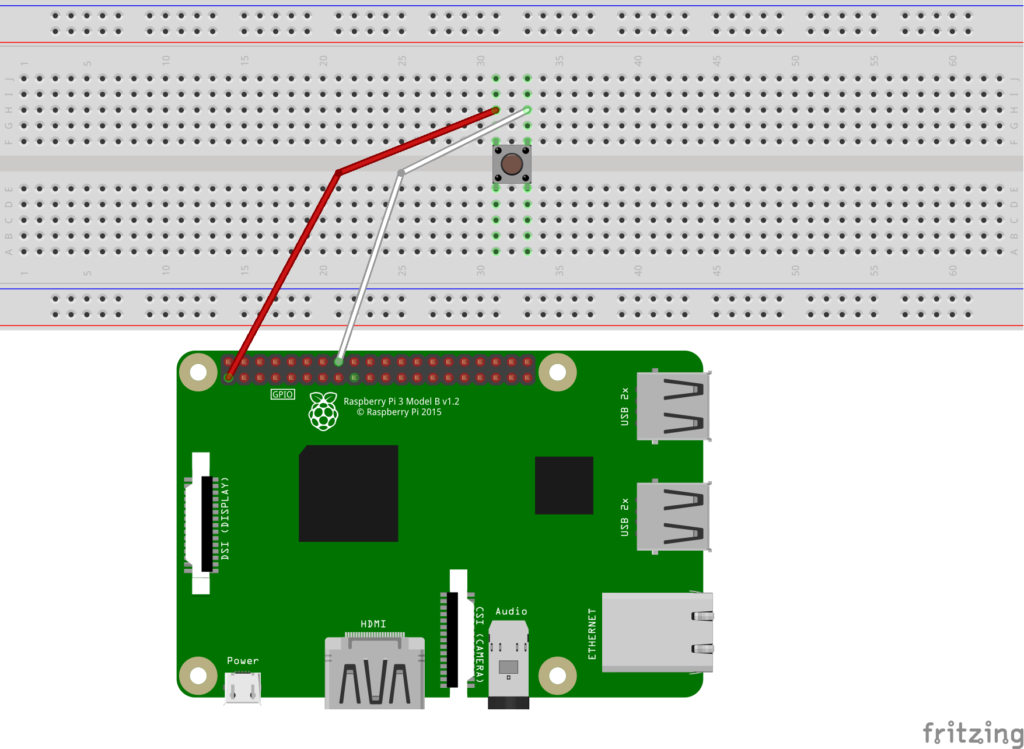
ラズベリーパイの3.3Vをタクトスイッチの片側に接続します。(赤いジャンパ線)
ラズベリーパイのGPIO 23番ポートをタクトスイッチのもう一方に接続します。(白いジャンパ線)
配線の様子です。こんな感じになりました。
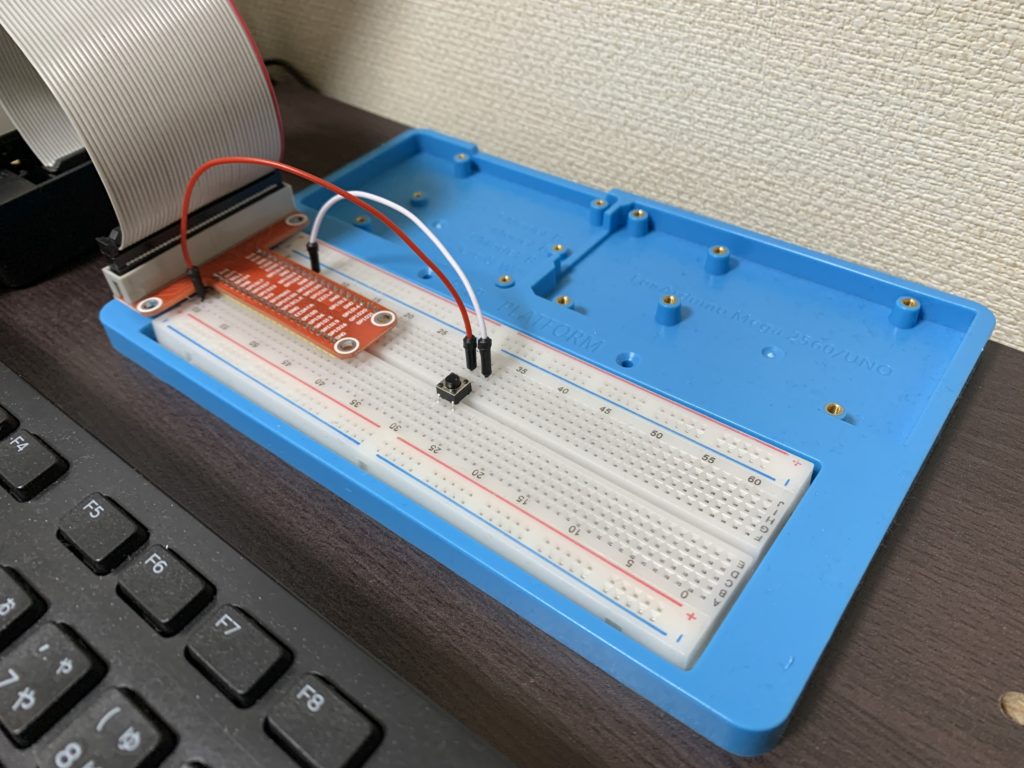
↑では、フラットケーブルでGPIOの全ピンをブレッドボードに接続しています。回路図と実際の配線は異なる部分がありますがご了承ください。
※電気的には「回路図」と同じ意味です。
4. プログラム(Python)
ラズベリーパイのGPIOピンを用いてスイッチのON/OFF状態を読み取り、実行結果に”0” or ”1”として表示させるプログラム(Python)は以下のようになります。
#必要なモジュールをインポート
import RPi.GPIO as GPIO #GPIO用のモジュールをインポート
import time #時間制御用のモジュールをインポート
import sys #sysモジュールをインポート
#ポート番号の定義
Sw_pin = 23 #変数"Sw_pin"に23を格納
#GPIOの設定
GPIO.setmode(GPIO.BCM) #GPIOのモードを"GPIO.BCM"に設定
#GPIO23を入力モードに設定してプルダウン抵抗を有効にする
GPIO.setup(Sw_pin, GPIO.IN, pull_up_down=GPIO.PUD_DOWN)
#while文で無限ループ
#GPIO23の入力を読み取る
while True:
try:
print(GPIO.input(Sw_pin)) #GPIO23が「ONで"1"」「OFFで"0"」
time.sleep(1) #5秒間待つ
except KeyboardInterrupt: #Ctrl+Cキーが押された
GPIO.cleanup() #GPIOをクリーンアップ
sys.exit() #プログラムを終了GPIO 23番ポートを入力モードに設定後、while文で無限ループして1秒間隔でGPIO 23番ポートの状態を読み取り、電流が流れている場合は”1”を電流が流れていない場合は”0”を表示しています。
#必要なモジュールをインポート
import RPi.GPIO as GPIO #GPIO用のモジュールをインポート
import time #時間制御用のモジュールをインポート
import sys #sysモジュールをインポート2行目~4行目で、GPIOピンを用いてスイッチのON/OFF状態を1秒間隔で読み取るために必要な「モジュール」を宣言します。
#ポート番号の定義
Sw_pin = 23 #変数"Sw_pin"に23を格納変数”Sw_pin”に23を格納します。後からGPIOのポート番号を変更する場合はここを変更します。
#GPIOの設定
GPIO.setmode(GPIO.BCM) #GPIOのモードを"GPIO.BCM"に設定
#GPIO23を入力モードに設定してプルダウン抵抗を有効にする
GPIO.setup(Sw_pin, GPIO.IN, pull_up_down=GPIO.PUD_DOWN)GPIOの設定を行います。
GPIO.setmode(GPIO.BCM)は、GPIO.setmode()を用いてGPIOをポート番号で扱う方法に設定します。
GPIO.setup(Sw_pin, GPIO.IN, pull_up_down=GPIO.PUD_DOWN)は、GPIO 23番ポートの内部にある抵抗をプルダウン抵抗に設定します。
#while文で無限ループ
#GPIO23の入力を読み取る
while True:
try:
print(GPIO.input(Sw_pin)) #GPIO23が「ONで"1"」「OFFで"0"」
time.sleep(1) #5秒間待つ
except KeyboardInterrupt: #Ctrl+Cキーが押された
GPIO.cleanup() #GPIOをクリーンアップ
sys.exit() #プログラムを終了「while文」は条件を指定して、その条件が真の時に繰り返し処理を行うものです。
while 条件式:
繰り返し処理を行うコード↑の「条件式」にtrueを指定することにより、条件式は常に真となりwhile文は無限に繰り返します。
ただし、このままではプログラム実行中に無限ループから抜け出す方法がありません。そこでwhile文の中にある「try文」と「except文」を使用します。
このtry-except文を用いることにより、while文の処理は以下のようになります。
while True:
try:
繰り返し処理を行うコード
except KeyboardInterrupt: #Ctrl+Cキーが押された
GPIO.cleanup() #GPIOをクリーンアップ
sys.exit() #プログラムを終了except KeyboardInterrupt:は、キーボードのCtrl + Cキーが押された時にwhile文の繰り返し処理から抜けて「GPIOのクリーンアップ」と「プログラムの終了」の処理を行います。
Ctrl + Cキーが押されていないとき、try:文の中の処理を繰り返し行います。(以下で解説)
print(GPIO.input(Sw_pin))は、GPIO 23番ポートの状態を読み取り”1”or”0”を表示します。
もう少し噛み砕くとGPIO.input(Sw_pin)は、GPIO 23番ポートに電流が流れていれば場合”1”となり、流れていなければ”0”となります。
この場合のprint()関数は、実行結果にGPIO.input(Sw_pin)の値を表示させているだけです。
print(表示する変数)
変数の値を表示するコードtime.sleep(1)は、何もせずに1秒間待ちます。この処理を行うために2行目でtimeモジュールをインポートしています。
while文の中(18,19行目)で、GPIO 23番ポートの状態を読み取り⇒0.5秒待つ処理を無限に繰り返します。
5. おわりに
ラズベリーパイのGPIOピンを用いてスイッチのON/OFF状態を読み取り、実行結果に”0” or ”1”として表示させる方法を解説しました。
まだまだラズベリーパイ初心者の私ですが、以下の参考書が大変参考にさせて頂いております。
2冊とも初学者にも易しい内容になっており、ゼロからラズベリーパイを始める方にもオススメできる参考書です。
電気ハード設計、PLC/タッチパネルソフト設計、ロボットティーチング、制御盤製作などの外注業務をご検討中の方は、ぜひ永工舎(エイコウシャ)にご相談ください。確かな技術と柔軟な対応で、現場の課題解決をサポートいたします。
当サイト「電気設計人.com」は個人事業主として永工舎を運営する永井が執筆しています。電気設計・制御設計に関する業務依頼やお見積もりも承っておりますので、お気軽にお問い合わせください。
シーケンス制御やラダープログラムの基礎から実務レベルまで、体系的に学べる良書をいくつか紹介します。どれも私自身が現場で役立ったと感じた参考書で、自信をもっておすすめできる内容です。


失礼致します、アマゾンの広報担当の久林と申します。BLOGにてお客様のレビューをご拝見させて頂きました、つきましてはお客様に弊社のラズベリーパイ4ケースレビューを投稿して頂きたく存じます。レビュー用機材に関しましては無償にて提供させて頂きます。御返事お待ちしております。どうぞよろしくお願いします