

ラズベリーパイは基板上に「GPIO」と呼ばれる、ラズベリーパイ上で作成したプログラムから信号の入力・信号の出力といった制御をすることができるピンが存在します。
信号の入力とは「スイッチのON/OFF」「温度計で室温の計測」といった、ラズベリーパイの外の情報を入力(インプット)してプログラム上で使用することです。
対して、信号の出力とは「LEDを点灯させる」「モータを回す」といった、ラズベリーパイで制御した結果を外に出力(アウトプット)することです。
この記事では、ラズベリーパイのプログラム(Python)からGPIOピンを用いてサーボモータの角度を制御する方法について解説します。
サーボモータを制御する方法は多々ありますが、今回は基本的な方法であるPWMサイクルのデューティ比を指定することにより角度を制御します。
目次
1. 完成イメージ(サーボモータを動かす)
この記事で完成するものは以下のようになります。
ラズベリーパイのGPIOピンとサーボモータを接続して、角度を-90° → 0° → +90°に繰り返し動作させます。
2. 使用する部品
今回使用する部品は以下の通りです。
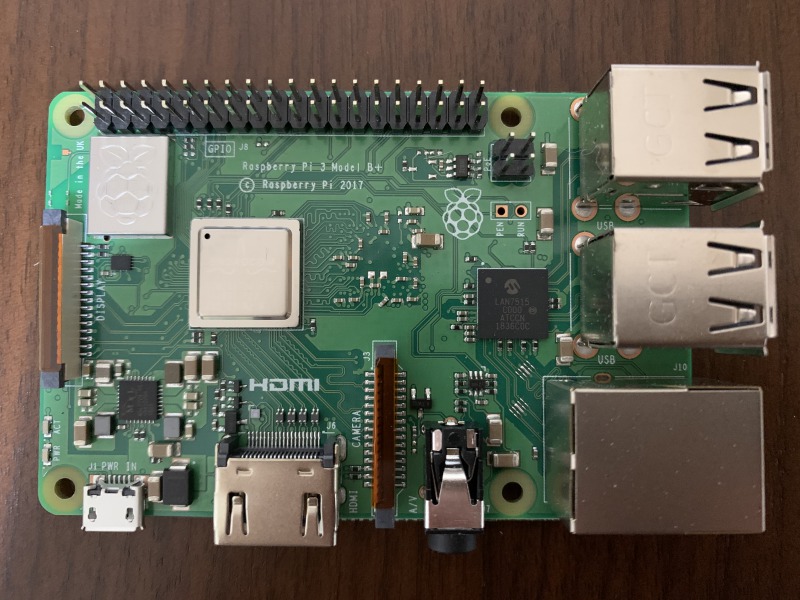
『Raspberry Pi 3 Model B+』を使用します。※2019年12月時点で最新はRaspberry Pi 4になります。
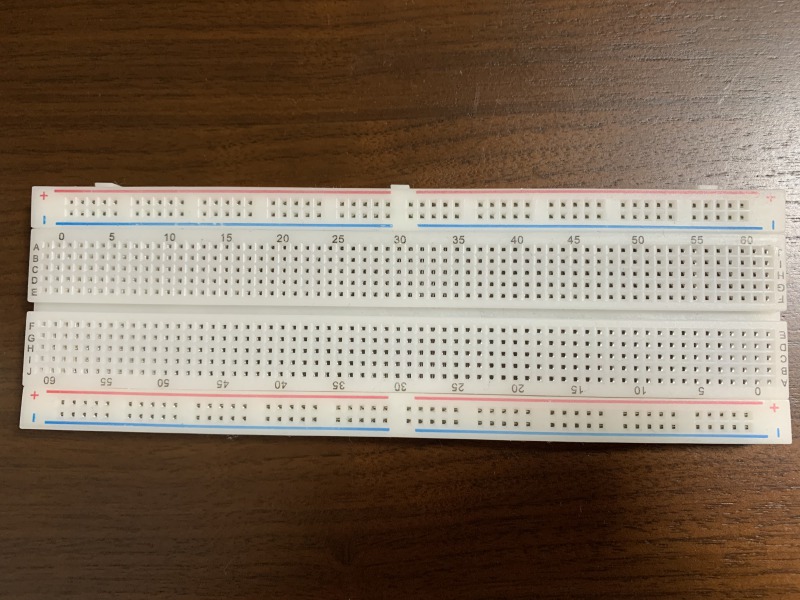
LEDや抵抗といった各種部品や(後述する)ジャンパ線などを穴に差し込み、部品間を電気的に接続する板(ボード)です。
電子工作をする上で必須の部品です。
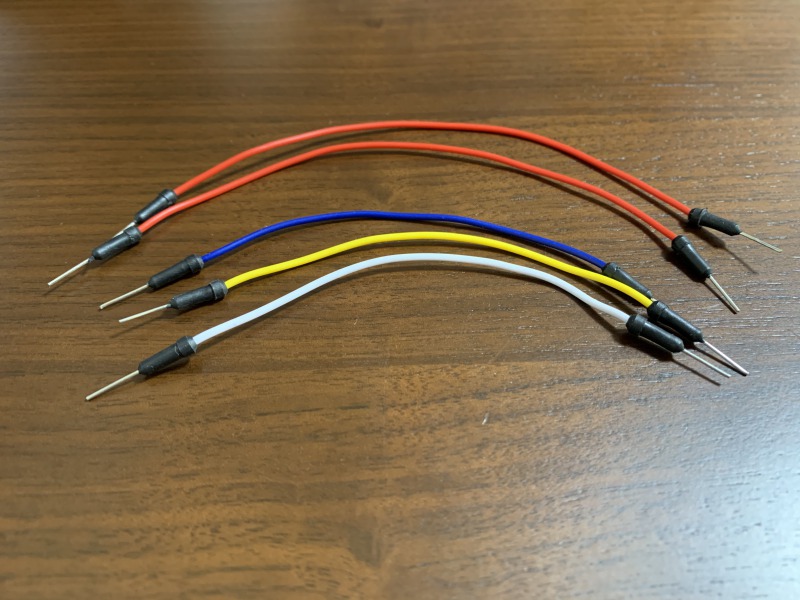
ブレッドボートに差し込み、電子部品の間を電気的に接続します。
↑の写真では両側が「ピン」になっており、ブレッドボートの穴に差し込んで使用します。

サーボモータ(Servo motor)とは、位置制御や速度制御ができるモータです。
製造業においてサーボモータは、位置決め・速度制御やトルク制御を行う機構によく用いられる大変高額なものですが、今回はラジコンやホビーロボットに用いられる安価で小型なサーボモータ:SG90を使用します。
サーボモータ:SG90の主要なスペックは以下のようになります。
| PWMサイクル | :20ms(50Hz) |
| 制御パルス | :0.5~2.4ms |
| 制御角度 | :±90°(180°) |
| 動作電圧 | :4.8V(~5V) |
| 動作スピード | :0.1s / 60° |
動作角度が±90°のため、モータをグルグル回すことはできません。
電子工作をするため、これまで解説した部品の他にもスイッチやセンサなど、色々な部品が必要になってきます。個々で購入するには手間がかかるため、最初はセット品を購入することをおススメします。

私は以下のセット品を購入しました!
また、これからラズベリーパイを購入する場合、ラズベリーパイ本体を含めたセット品を購入することをおススメします。
ラズベリーパイ本体を収めるケースや、OSをインストールするためmicroSDカードなど必要なものを個々に購入する手間を省くことができます。
3. 回路図・配線の様子
ラズベリーパイのプログラム(Python)からGPIOピンを用いてサーボモータの角度を制御する回路を解説します。
回路図は以下のようになります。
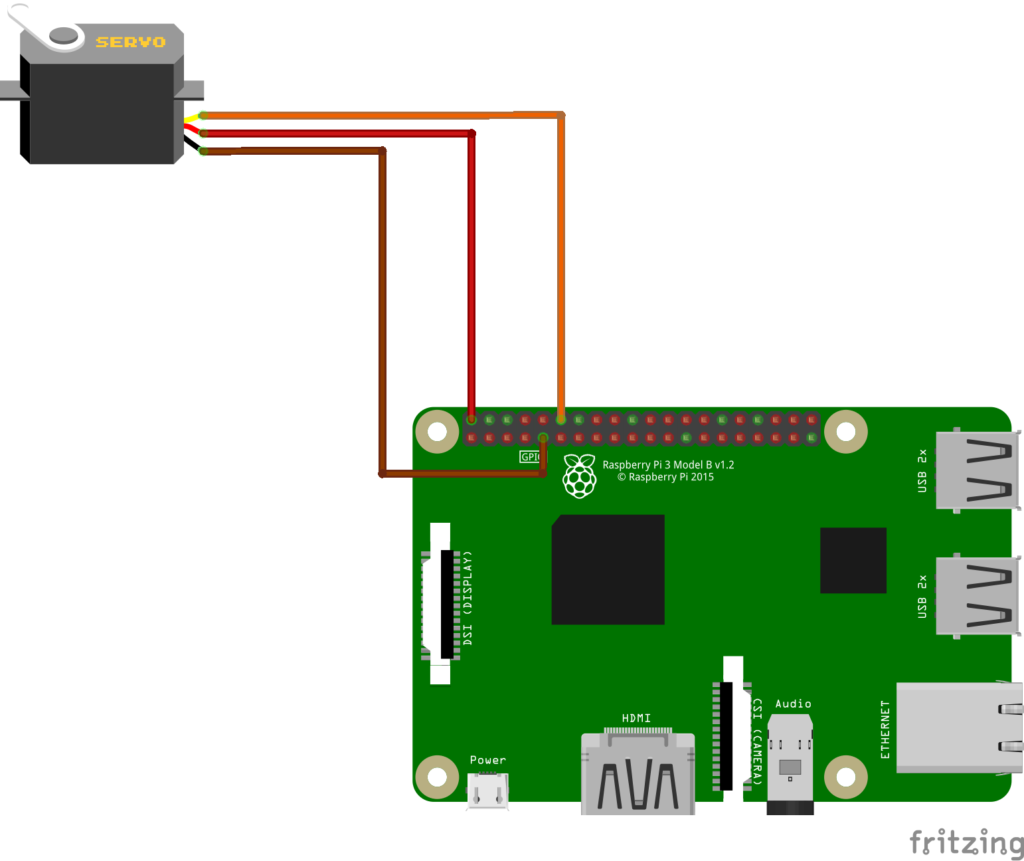
サーボモータの赤線とラズベリーパイの5Vピンに接続します。
サーボモータのオレンジ線とラズベリーパイのGPIO 18番ポートに接続します。
サーボモータの茶線とラズベリーパイのGNDに接続します。
配線の様子です。こんな感じになりました。
「この画像から何を読み取れっちゅうねん!」って感じですね…。
↑では、フラットケーブルでGPIOの全ピンをブレッドボードに接続しています。回路図と実際の配線は異なる部分がありますがご了承ください。
※電気的には「回路図」と同じ意味です。
4. プログラム(Python)
GPIOピンを用いてサーボモータの角度を制御するプログラム(Python)は以下のようになります。
#必要なモジュールをインポート
import RPi.GPIO as GPIO #GPIO用のモジュールをインポート
import time #時間制御用のモジュールをインポート
import sys #sysモジュールをインポート
#ポート番号の定義
Servo_pin = 18 #変数"Servo_pin"に18を格納
#GPIOの設定
GPIO.setmode(GPIO.BCM) #GPIOのモードを"GPIO.BCM"に設定
GPIO.setup(Servo_pin, GPIO.OUT) #GPIO18を出力モードに設定
#PWMの設定
#サーボモータSG90の周波数は50[Hz]
Servo = GPIO.PWM(Servo_pin, 50) #GPIO.PWM(ポート番号, 周波数[Hz])
Servo.start(0) #Servo.start(デューティ比[0-100%])
#while文で無限ループ
#サーボモータの角度をデューティ比で制御
#Servo.ChangeDutyCycle(デューティ比[0-100%])
while True:
try:
Servo.ChangeDutyCycle(2.5) #デューティ比[2.5%] = -90°
time.sleep(0.5) #0.5秒間待つ
Servo.ChangeDutyCycle(7.25) #デューティ比[7.25%] = 0°
time.sleep(0.5) #0.5秒間待つ
Servo.ChangeDutyCycle(12) #デューティ比[12%] = +90°
time.sleep(0.5) #0.5秒間待つ
except KeyboardInterrupt: #Ctrl+Cキーが押された
Servo.stop() #サーボモータをストップ
GPIO.cleanup() #GPIOをクリーンアップ
sys.exit() #プログラムを終了極端に言うと、GPIOの18番ポートを用いてPWM出力のデューティ比をwhile文で繰り返し変化させているプログラムです。
#必要なモジュールをインポート
import RPi.GPIO as GPIO #GPIO用のモジュールをインポート
import time #時間制御用のモジュールをインポート
import sys #sysモジュールをインポート2行目~4行目で、今回必要な「モジュール」を宣言します。
#ポート番号の定義
Servo_pin = 18 #変数"Servo_pin"に18を格納変数”Servo_pin”に18を格納します。後からGPIOのポート番号を変更する場合はここを変更します。
#GPIOの設定
GPIO.setmode(GPIO.BCM) #GPIOのモードを"GPIO.BCM"に設定
GPIO.setup(Servo_pin, GPIO.OUT) #GPIO18を出力モードに設定GPIOの設定を行います。
GPIO.setmode(GPIO.BCM)は、GPIO.setmode()を用いてGPIOをポート番号で扱う方法に設定します。
GPIO.setup(Servo_pin, GPIO.OUT)は、GPIO.setup()を用いてGPIO 18番ポートを出力モードに設定します。
#PWMの設定
#サーボモータSG90の周波数は50[Hz]
Servo = GPIO.PWM(Servo_pin, 50) #GPIO.PWM(ポート番号, 周波数[Hz])PWM信号を使用する為の設定を行います。
Servo = GPIO.PWM(Servo_pin, 50)は、GPIO 18番ポートを50HzのPWM信号に割り当てます。
Servo.start(0) #Servo.start(デューティ比[0-100%])Servo.start(0)は、GPIO 18番ポートのPWM信号のデューティ比を0%に出力します。
#while文で無限ループ
#サーボモータの角度をデューティ比で制御
#Servo.ChangeDutyCycle(デューティ比[0-100%])
while True:
try:
Servo.ChangeDutyCycle(2.5) #デューティ比[2.5%] = -90°
time.sleep(0.5) #0.5秒間待つ
Servo.ChangeDutyCycle(7.25) #デューティ比[7.25%] = 0°
time.sleep(0.5) #0.5秒間待つ
Servo.ChangeDutyCycle(12) #デューティ比[12%] = +90°
time.sleep(0.5) #0.5秒間待つ
except KeyboardInterrupt: #Ctrl+Cキーが押された
Servo.stop() #サーボモータをストップ
GPIO.cleanup() #GPIOをクリーンアップ
sys.exit() #プログラムを終了「while文」は条件を指定して、その条件が真の時に繰り返し処理を行うものです。
while 条件式:
繰り返し処理を行うコード↑の「条件式」にtrueを指定することにより、条件式は常に真となりwhile文は無限に繰り返します。
ただし、このままではプログラム実行中に無限ループから抜け出す方法がありません。そこでwhile文の中にある「try文」と「except文」を使用します。
このtry-except文を用いることにより、while文の処理は以下のようになります。
while True:
try:
繰り返し処理を行うコード
except KeyboardInterrupt: #Ctrl+Cキーが押された
GPIO.cleanup() #GPIOをクリーンアップ
sys.exit() #プログラムを終了except KeyboardInterrupt:は、キーボードのCtrl + Cキーが押された時にwhile文の繰り返し処理から抜けて「GPIOのクリーンアップ」と「プログラムの終了」の処理を行います。
Ctrl + Cキーが押されていないとき、try:文の中の処理を繰り返し行います。(以下で解説)
Servo.ChangeDutyCycle(2.5)はGPIO 18番ポートのデューティ比を2.5%に変更します。SG90はデューティ比を2.5%にすることで約-90°に動作します。
Servo.ChangeDutyCycle(7.25)はGPIO 18番ポートのデューティ比を7.25%に変更することで、SG90は約0°に動作します。
Servo.ChangeDutyCycle(12)はGPIO 18番ポートのデューティ比を12%に変更することで、SG90は約90°に動作します。
time.sleep(0.5)は、何もせずに0.5秒間待ちます。この処理を行うために2行目でtimeモジュールをインポートしています。
while文の中(24~29行目)でGPIO 18番のPWM信号のデューティ比を2.5%⇒7.25%⇒12%に変更する処理を無限に繰り返します。
5. おわりに
ラズベリーパイのGPIOピンを用いてプログラム(Python)からサーボモータの角度を制御する方法を解説しました。
まだまだラズベリーパイ初心者の私ですが、以下の参考書が大変参考にさせて頂いております。
2冊とも初学者にも易しい内容になっており、ゼロからラズベリーパイを始める方にもオススメできる参考書です。
電気ハード設計、PLC/タッチパネルソフト設計、ロボットティーチング、制御盤製作などの外注業務をご検討中の方は、ぜひ永工舎(エイコウシャ)にご相談ください。確かな技術と柔軟な対応で、現場の課題解決をサポートいたします。
当サイト「電気設計人.com」は個人事業主として永工舎を運営する永井が執筆しています。電気設計・制御設計に関する業務依頼やお見積もりも承っておりますので、お気軽にお問い合わせください。
シーケンス制御やラダープログラムの基礎から実務レベルまで、体系的に学べる良書をいくつか紹介します。どれも私自身が現場で役立ったと感じた参考書で、自信をもっておすすめできる内容です。


ハードウェアpwmで繰り返し動作させる場合のプログラムはどうなりますか?