

SPI(Serial Peripheral Interface)とは、ICなどの電子部品と通信するために使用される通信方法の一種です。旧モトローラ社が提唱した規格で、汎用性が高いことから広く使われています。
デバイス間を繋ぐ信号線が4本(3本の場合もある)であり、数Mbpsの通信が可能といった特徴があります。
ADコンバータとは、アナログ(A)信号を入力して、入力電圧に応じたデジタル(D)信号を出力する部品です。
この記事では、ラズベリーパイのプログラム(Python)からSPI通信を用いてADコンバータに接続された半固定ボリュームの値を読み取る方法を解説します。
目次
1. 完成イメージ(ADコンバータの値を読み取る)
この記事で完成するものは以下のようになります。
半固定ボリュームを回すと、実行結果は以下のように1~1023の数値が表示されます。
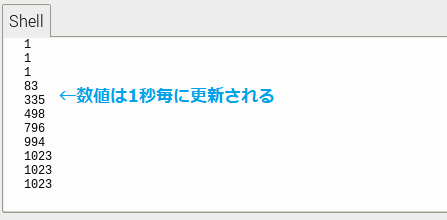
半固定ボリュームを右に回すと数値が増大します。
2. 使用する部品
今回使用する部品は以下の通りです。
『Raspberry Pi 3 Model B+』を使用します。※2020年6月時点で最新はRaspberry Pi 4になります。
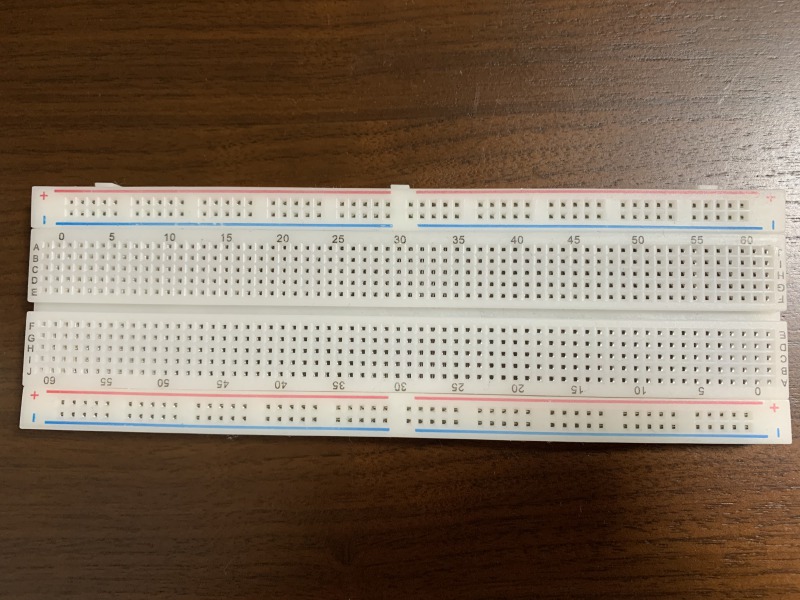
LEDや抵抗といった各種部品や(後述する)ジャンパ線などを穴に差し込み、部品間を電気的に接続する板(ボード)です。
電子工作をする上で必須の部品です。
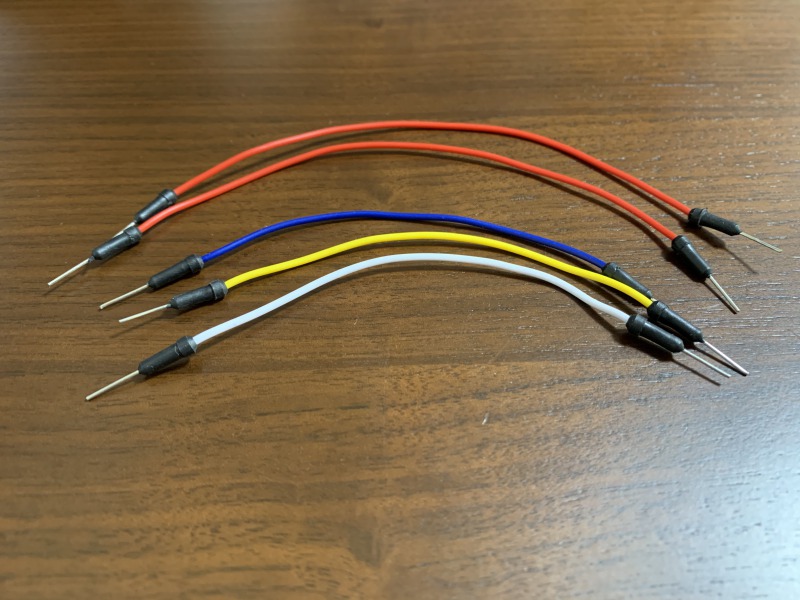
ブレッドボートに差し込み、電子部品の間を電気的に接続します。
↑の写真では両側が「ピン」になっており、ブレッドボートの穴に差し込んで使用します。

(小さくてすいません…)
今回はSPI通信に対応したADコンバータであるMCP3002を使用します。各ピンの機能は以下のようになります。
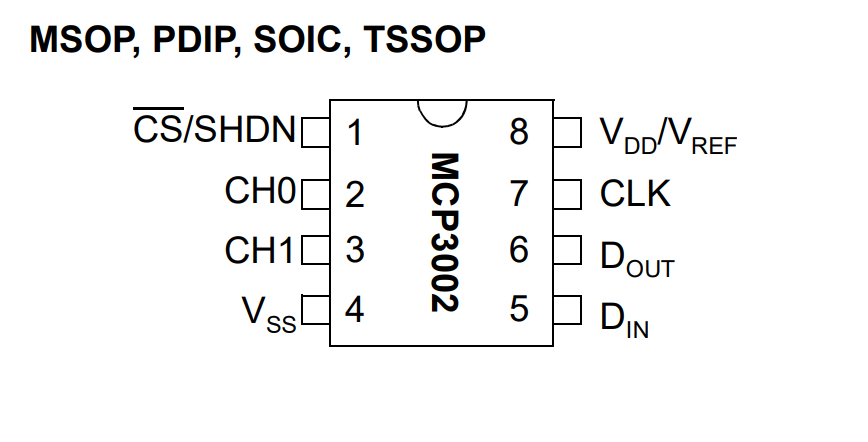
| 1 | :CS/SHDN | :チップセレクト |
| 2 | :CH0 | :チャンネル0 アナログ入力 |
| 3 | :CH1 | :チャンネル1 アナログ入力 |
| 4 | :Vss | :GND |
| 5 | :Din | :シリアルデータ入力 |
| 6 | :Dout | :シリアルデータ出力 |
| 7 | :CLK | :シリアルクロック |
| 8 | :Vdd/Vref | :電源(+2.7V~5.5V) |

半固定ボリューム(半固定抵抗器)は、ツマミを回すと抵抗値が変化する部品です。今回は0~10kΩ範囲の抵抗値を可変できる半固定ボリュームを使用します。
電子工作をするため、これまで解説した部品の他にもスイッチやセンサなど、色々な部品が必要になってきます。個々で購入するには手間がかかるため、最初はセット品を購入することをおススメします。

私は以下のセット品を購入しました!
また、これからラズベリーパイを購入する場合、ラズベリーパイ本体を含めたセット品を購入することをおススメします。
ラズベリーパイ本体を収めるケースや、OSをインストールするためmicroSDカードなど必要なものを個々に購入する手間を省くことができます。
3. 回路図・配線の様子
ラズベリーパイのプログラム(Python)からSPI通信を用いてADコンバータに接続された半固定ボリュームの値を読み取る回路を解説します。
回路図は以下のようになります。
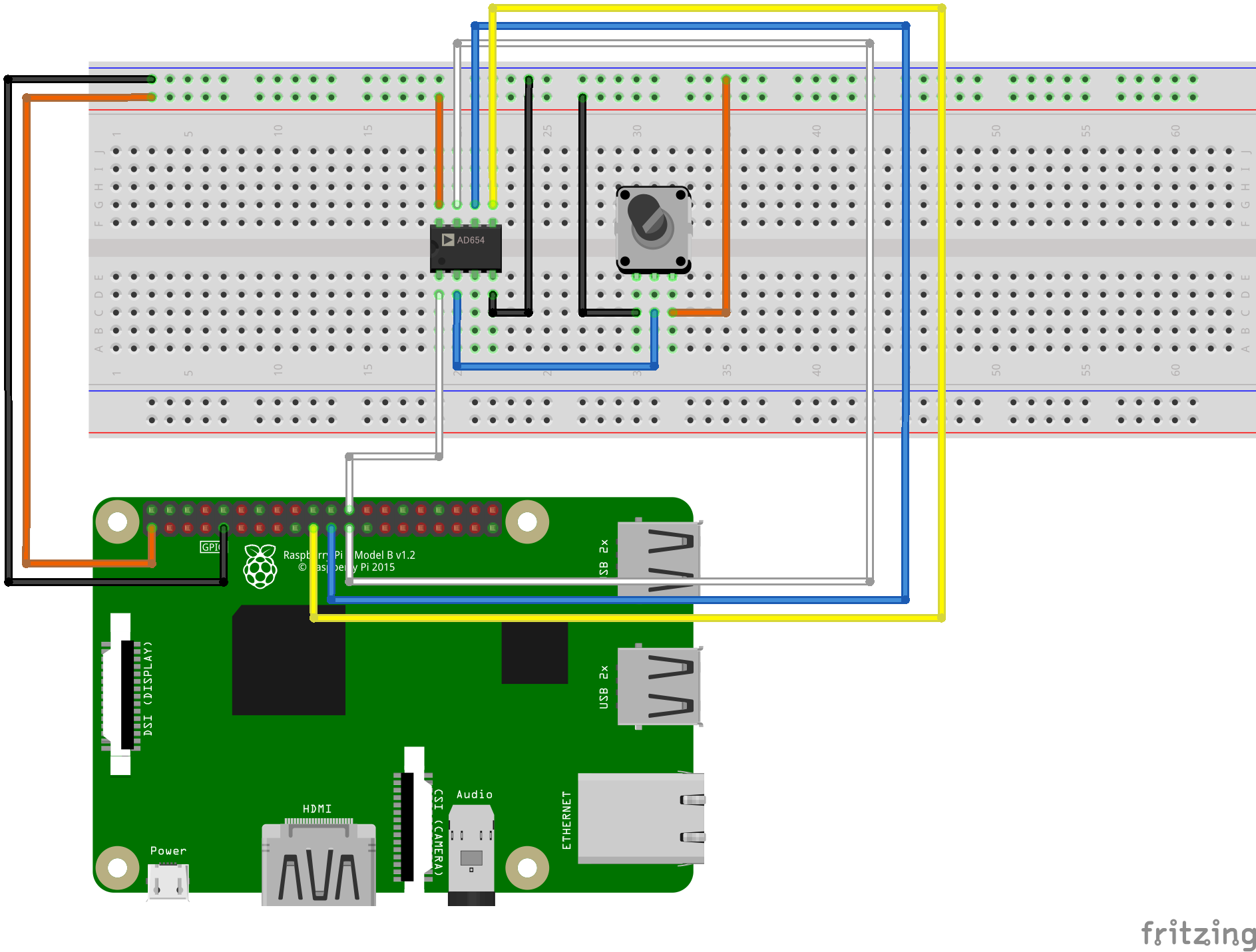
SPI通信をする場合「制御するデバイスをマスタ」「制御されるデバイスをスレーブ」と呼び、マスタとスレーブは4本の信号線で接続します。
今回のようにラズベリーパイでADコンバータの値を読み取る場合、「マスタがラズベリーパイ」「スレーブがADコンバータ」となります。
ラズベリーパイをADコンバータ(MCP3002)とSPI通信するため、以下のように接続します。
| ラズベリーパイのピン | MCP3002のピン | ジャンパ線 |
|---|---|---|
| SPICS0 | CS/SHDN(1番ピン) | 白色 |
| SPIMOSI | Din(5番ピン) | 黄色 |
| SPIMISO | Dout(6番ピン) | 青色 |
| SPISCLK | CLK(7番ピン) | 白色 |
白色が被ってしまいました…ジャンパ線はこの色でなければいけない訳ではありません。
MCP3002と半固定ボリュームを接続する必要があります。今回はMCP3002のCH0(2番ピン)に接続します。(青色のジャンパ線)
3.3VとGNDをMCP3002と半固定ボリュームに各々接続します。(オレンジ色と黒色のジャンパ線)
配線の様子です。こんな感じになりました。
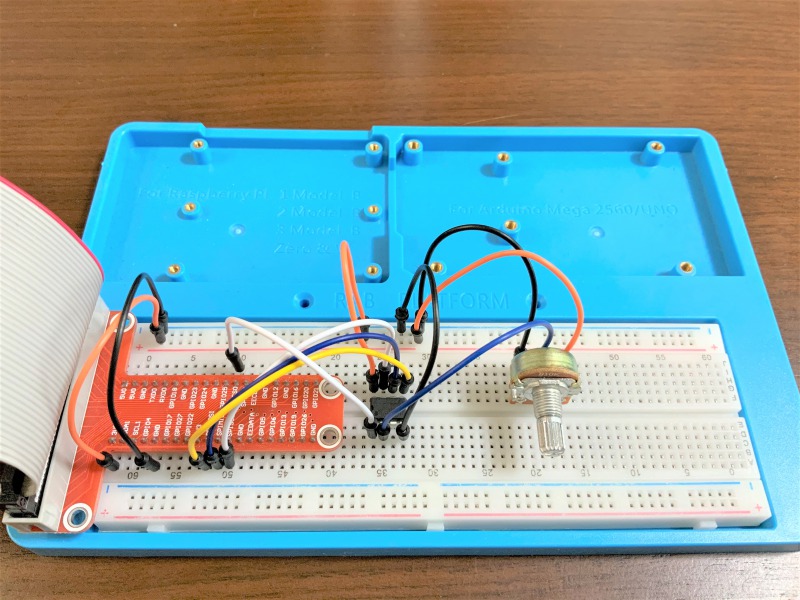
↑では、フラットケーブルでGPIOの全ピンをブレッドボードに接続しています。回路図と実際の配線は異なる部分がありますがご了承ください。
※電気的には「回路図」と同じ意味です。
4. プログラム(Python)
SPI通信を用いてADコンバータに接続された半固定ボリュームの値を読み取るプログラム(Python)は以下のようになります。
#必要なモジュールをインポート
import spidev #SPI通信用のモジュールをインポート
import time #時間制御用のモジュールをインポート
import sys #sysモジュールをインポート
#SPI通信を行うための準備
spi = spidev.SpiDev() #インスタンスを生成
spi.open(0, 0) #CE0(24番ピン)を指定
spi.max_speed_hz = 1000000 #転送速度 1MHz
#連続して値を読み込む
while True:
try:
resp = spi.xfer2([0x68, 0x00]) #SPI通信で値を読み込む
volume = ((resp[0] << 8) + resp[1]) & 0x3FF #読み込んだ値を10ビットの数値に変換
print(volume) #変換した値を表示
time.sleep(1) #1秒間待つ
except KeyboardInterrupt:
#Ctrl+Cキーが押された
spi.close() #SPI通信を終了
sys.exit() #プログラム終了SPI通信でMCP3002の値を読み取り、変換して画面に表示します。
#必要なモジュールをインポート
import spidev #SPI通信用のモジュールをインポート
import time #時間制御用のモジュールをインポート
import sys #sysモジュールをインポート2~4行目で今回必要な「モジュール」を宣言します。
#SPI通信を行うための準備
spi = spidev.SpiDev() #インスタンスを生成
spi.open(0, 0) #CE0(24番ピン)を指定
spi.max_speed_hz = 1000000 #転送速度 1MHzSPI通信をする準備をします。SpiDev()メソッドはspiという名称でSPI通信をできるようにします。
spi.open(0, 0)は、CE0(24番ピン)に接続したデバイスと通信を開始します。CE1(26番ピン)に接続したデバイスと通信する場合はspi.open(0, 1)と記述します。
#連続して値を読み込む
while True:
try:
resp = spi.xfer2([0x68, 0x00]) #SPI通信で値を読み込む
volume = ((resp[0] << 8) + resp[1]) & 0x3FF #読み込んだ値を10ビットの数値に変換
print(volume) #変換した値を表示
time.sleep(1) #1秒間待つ
except KeyboardInterrupt:
#Ctrl+Cキーが押された
spi.close() #SPI通信を終了
sys.exit() #プログラム終了「while文」は条件を指定して、その条件が真の時に繰り返し処理を行うものです。
while 条件式:
繰り返し処理を行うコード↑の「条件式」にTrueを指定することにより、条件式は常に真となりwhile文は無限に繰り返します。
ただし、このままではプログラム実行中に無限ループから抜け出す方法がありません。そこでwhile文の中にある「try文」と「except文」を使用します。
このtry-except文を用いることにより、while文の処理は以下のようになります。
while True:
try:
繰り返し処理を行うコード
except KeyboardInterrupt: #Ctrl+Cキーが押された
spi.close() #SPI通信を終了
sys.exit() #プログラムを終了except KeyboardInterrupt:は、キーボードのCtrl + cキーが押された時にwhile文の繰り返し処理から抜けて「GPIOのクリーンアップ」と「プログラムの終了」の処理を行います。
Ctrl + cキーが押されていないとき、try:文の中の処理を繰り返し行います。(以下で解説)
while文の中の「繰り返し処理を行うコード」は以下の通りです。つまり、Ctrl + Cキーが押されるまで以下の処理を繰り返します。
resp = spi.xfer2([0x68, 0x00]) #SPI通信で値を読み込む
volume = ((resp[0] << 8) + resp[1]) & 0x3FF #読み込んだ値を10ビットの数値に変換
print(volume) #変換した値を表示
time.sleep(1) #1秒間待つspi.xfer2([0x68, 0x00])では、MCP3002のCH0(チャンネル0 アナログ入力)のアナログ値を取得します。
MCP3002から取得したデータはresp[0]とresp[1]の2バイトに分かれます。シフト演算子を用いて1ヶにまとめます。
time.sleep(1)は何もせずに1秒間待ちます。
5. おわりに
ラズベリーパイのプログラム(Python)からSPI通信を用いてADコンバータに接続された半固定ボリュームの値を読み取る方法を解説しました。
SPI通信を使用すると、電子工作の幅がグッと広がります。
まだまだラズベリーパイ初心者の私ですが、以下の参考書が大変参考にさせて頂いております。
2冊とも初学者にも易しい内容になっており、ゼロからラズベリーパイを始める方にもオススメできる参考書です。
電気ハード設計、PLC/タッチパネルソフト設計、ロボットティーチング、制御盤製作などの外注業務をご検討中の方は、ぜひ永工舎(エイコウシャ)にご相談ください。確かな技術と柔軟な対応で、現場の課題解決をサポートいたします。
当サイト「電気設計人.com」は個人事業主として永工舎を運営する永井が執筆しています。電気設計・制御設計に関する業務依頼やお見積もりも承っておりますので、お気軽にお問い合わせください。
シーケンス制御やラダープログラムの基礎から実務レベルまで、体系的に学べる良書をいくつか紹介します。どれも私自身が現場で役立ったと感じた参考書で、自信をもっておすすめできる内容です。


ありがとうございます
わかりやすかった